Firmware and Bootloader
-

Implementing CAN on Aurix TC275 Lite Kit
Introduction This article discusses implementing CAN on Aurix TC275 microcontroller using the KIT_AURIX_TC275_LITE evaluation board. The implementation is based on Infineon’s official example project MULTICAN_1_KIT_TC275_LK, with a focus on modifying it to disable Loop-Back mode in order to enable communication with external CAN devices. In the original example, MULTICAN_1_KIT_TC275_LK demonstrates the use of the MultiCAN…
-
Implementing jump function – STM32 vs Aurix TriCore
Overview In embedded C, a “jump” typically refers to transferring program execution to another point in code outside of the normal sequential flow (common in bootloaders or multi-image firmware). This article will focus on implementing jump function from bootloader to application in the context of STM32 and Aurix TriCore microcontrollers. A jump requires two parameters…
-
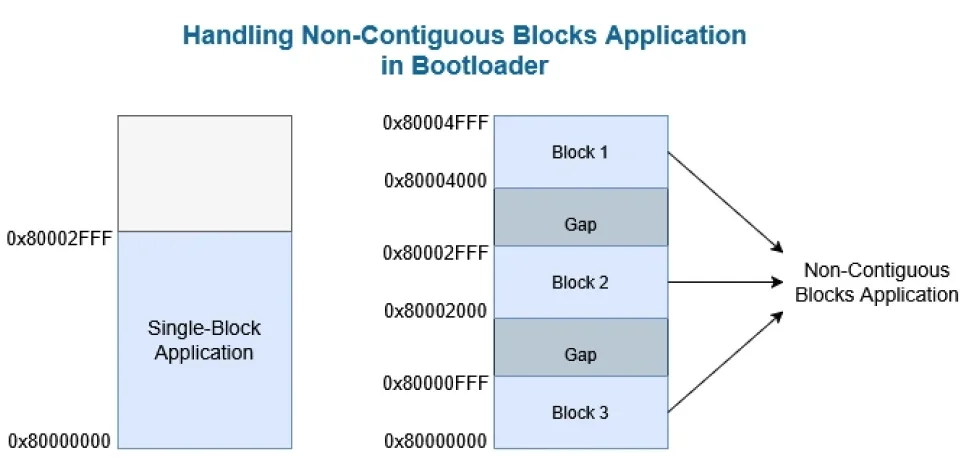
Protected: Automotive ECU’s Bootloader – Part 8 – Handling Non-Contiguous Application Blocks
There is no excerpt because this is a protected post.